Exoskeleton
The Maryland-Georgetown-Army (MGA) Exoskeleton, shown in Fig. 1, was originally a six degree-of-freedom (DOF) device designed for shoulder rehabilitation. The shoulder assembly consists of three intersecting-axis rotary joints mounted on circular links surrounding the shoulder that replicates a “ball-and-socket” joint. In addition, a scapula joint mounted on the torso is used to replicate the shoulder elevation and depression that occurs as the result of tilting of the scapula joint about the thorax. The lower arm consisted of an active elbow joint and a passive forearm roll joint connected to a handle. There were also three passive sliding joints (clavicle, humerous, and forearm) that could be adjusted to fit different subjects. The range of motion covered over 90% of the anatomical workspace, and the torque output matched the 95th percentile of adult males. Force sensors at the handle and upper arm allowed the exoskeleton to be used for both isolateral shoulder rehabilitation exercises as well as functional training using virtual reality (https://www.youtube.com/watch?v=uJza6G-7tD4).

Fig. 1: The original MGA Exoskeleton had five active degrees of freedom and a passive forearm joint.
The wrist on the MGA Exoskeleton was recently upgraded from a single degree of freedom passive roll joint in the forearm to a fully-actuated 3-DOF wrist with forearm pronation/supination, wrist flexion/extension/ and wrist abduction/adduction (see Figure 2). A fourth passive sliding joint was added to adjust the palm distance from the wrist, and a third force sensor was added at the human forearm interface. Upgrading to a fully anthropomorphic design will allow the exoskeleton to be used as a dexterous input device for controlling robot arms performing remote tasks such as fixing satellites on-orbit while reflecting forces back to the operator. The exoskeleton is currently undergoing electronics and software integration to accommodate the addition of the new wrist. Some YouTube video links for the new wrist can be found at:
https://www.youtube.com/watch?v=F8UM9dxshWM
https://www.youtube.com/watch?v=X1LbTebkBn4
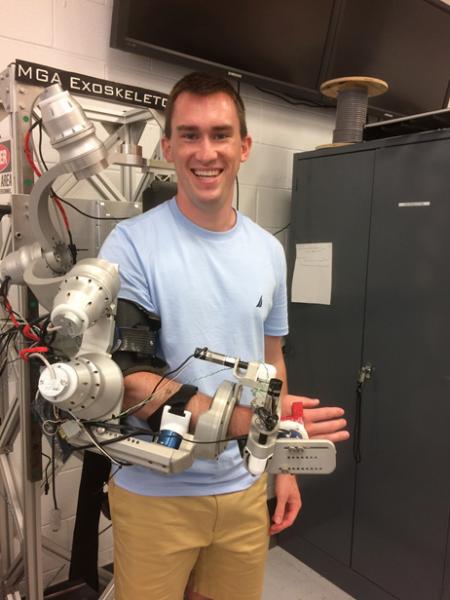
Fig. 2: The upgraded MGA Exoskeleton has a 3-axis powered wrist.